写这篇文章其实比赛已经过了很久了,就连保研都已经结束了,还是舍不得这段回忆,趁着还有点记忆先记录下来,以后也是个美好的回忆吧。我的机器人之旅起源于robocup之旅,当时那个比赛结束了,我也还是选择留了下来,找了新队友组参与了计算机视觉的项目,这个项目在我们学校是传统优势项目,前两年都获得了全国第一的成绩,排位前三的人还可以获得保研名额,为了避免麻烦团队就三个人,一起努力备战机器人大赛。
工业测量
中国机器人大赛先进视觉赛项共有两个子项目分别为3D识别和工业测量两个项目,我们团队最终选择的是工业测量赛项,赛题要求我们利用RGBD摄像头测量桌面上的螺栓长度和直径,以及垫片的内外径,误差越小得分越高。测量场景图如下。相比于上一届的项目,这届项目规则改动巨大,甚至把计算设备换成了Jetson Nano。基本相当于一个全新的项目,对我们带来了巨大的挑战。
备战
项目刚拿到手,对像我们这个机器视觉小白来说可谓是不知从何下手。虽然说比赛是有指导教师的,老师基本不管,就只能靠我们自己和上一届学长的指导。第一步就是先把上一届的代码拿来,看看需要哪些技能,哪些代码是可以复用的。项目所需的技能包括:3D点云,目标识别,openCV等,除了对openCV有些了解外,其余一概不知,项目前半个月就靠自己摸索,以及对知识的学习。找桌子的算法直接沿袭了上一届的想法,通过3D点云拟合桌面并进行桌角标定。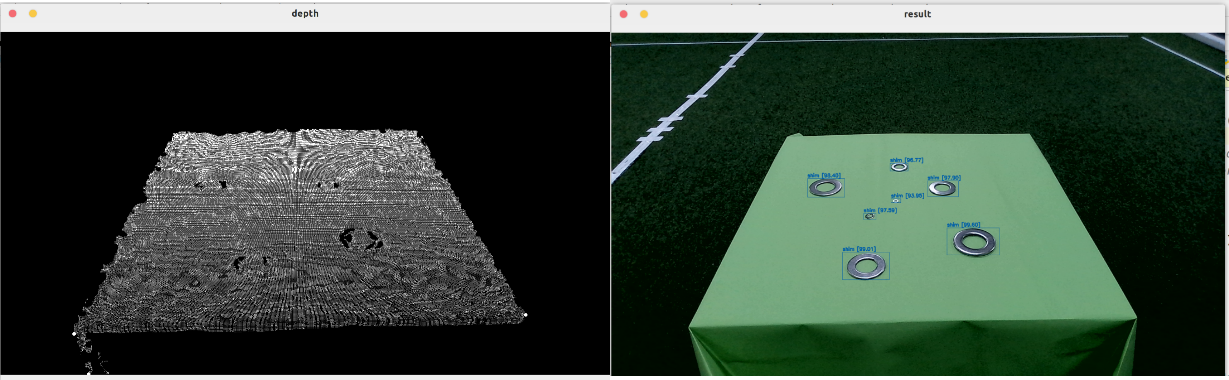
模型训练这块直接交给韬哥负责,上一届用的是cascade系列的模型,但是为two stage模型,当我们放在Nano上的时候速度实在是太慢了,后面换成了yolo系列的。首先尝试了yoloV4,自己拍照片打标签做数据集,进行训练,因为是二分类的任务,大概打了900张左右的图片,训练之后的效果还不错,就一直先用着了。但是后面发现螺栓垫片之间存在遮挡的时候,由于yolo无法区分两个物体,导致我们的测量精度很低。后面换了yoloct系列的模型,实例分割模型可以很好的对物体进行区别,可以较好的提取物体轮廓,缓解遮挡叠放问题。但是后面我们尝试就模型部署到Nano上时,速度实在是太慢了,权衡利弊考虑,最终还是选择了yoloV4。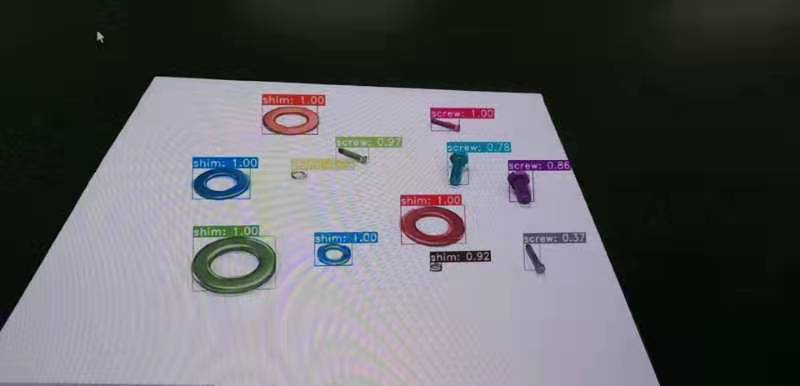
我们的大致思路是,先利用3D点云拟合桌面并进行桌角标定,然后利用透视变换将桌子点映射到一个1000*1000的正方形上,得出像素长度与实际长度之间的转化比例。然后利用yolov4对物体进行识别,然后提取每一个bbox利用测量算法找到要计算的两个点,利用像素长度与实际长度的转换
得出测量真值。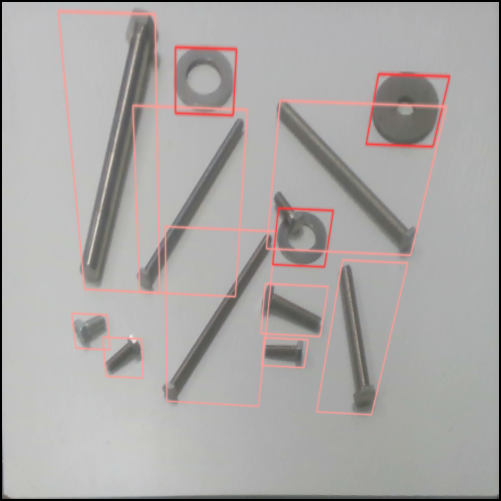
接着就是具体测量部分了,我们是利用二值化和找轮廓算法对图像进行处理,对于垫片最大外轮廓得到他的外接矩形两个顶点距离为外经长度,同理对最大内轮廓进行相同操作也可得到内径长度。对于螺栓,由于螺栓比较不规则,测量难度较大,我们对螺栓的轮廓进行凸包的处理,得到靠近桌子的两个点,这两个点透视变换之后影响较小,直径是利用法向量直线找到两个点,螺栓这块一直有误差,最后也没有很好的解决。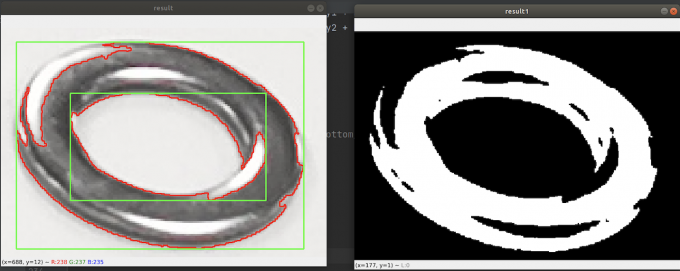
项目的大体思路就是这样,具体实现过程还是一步步慢慢迭代算法,也是一蹴而就,经过大量实验分析,不断修改算法,最终在9月底的时候算法基本完成了,就差细节调优了。原定11月的比赛,却被突如其来的疫情无休止的打断了,比赛时间也拖到了来年春季,这样我们的项目进度也告一段落,后续大家各忙各的学业,打算等赛前再继续。
线上测试
很快时间来到春季,距离原定的比赛时间也越来越近。我们团队也开始准备起来,对原来项目慢慢熟悉起来。然而那时上海爆发疫情,每日成百上千的增长,线下指日无望,很快线上比赛的通知也来了。线上比赛为了追求公平,最终觉得把设备寄到比赛地,参赛者只要提供可执行脚本和软件运行指南即可。无法到现场实地测试,加大了我们比赛的难度,因为我们的摄像头是需要调参的,这更要求了我们算法的鲁棒性。
当时项目还没有完全部署到Nano上,所以先完成了部署,为了控制算法的是时间,我们减少了找桌子的次数,因为比赛时时间分很重要,对一些该处理的地方加了try expect防止报错。
比赛允许我们提前进行一次测试,所以提前将一个Nano和一张SD卡寄了过去,线上调试也是挺搞的,我们队伍顺序在最后几个,轮到我们的时候都到晚上10点多了。是进入一个腾讯会议,主办方会显示nano界面,我们指挥如何操作,还看了看相机参数设置。运行代码后遇到了bug,我们跑了四次程序,其中有两次程序报错了,虽然这个bug我们平时也有遇到(极少),但是重新运行后又不会出现,不太好定位问题,所以没怎么管。成功运行的两次,测量结果也不太好大概4分左右(满分6分)。测试,结束我们马不停蹄开始找bug,记得当时和韬哥、根行哥在计算机3楼教室待到凌晨2点多。通过不断摆放物品,和改变现场环境,最终发现是场外物品干扰,导致我们扩充像素的时候,比原像素还大了,我们赶紧修改代码,加了补救措施。对于测量精度不高的问题,我们发现提供的测试物体整体尺寸偏大,后续我也将我买的物品中打得加入我们平时测试中,我买的物体实际整体偏小,螺栓8cm以上的很少(这里也为我们后来失利埋下伏笔)。
线上测试结束后,我们就小修代码,然后不断测试,在我们自己的数据集上有了很好的结果,最终把一些细节处理了下,把SD卡烧好了,寄到主办方,等待正式比赛了。
线上比赛
比赛日也就在测试后三天,我们的项目放到了周日比,早上第一轮,下午第二轮,我们队伍顺序在中间。虽然说是比赛,其实就是看直播,代码什么的都已经没法修改了。也是腾讯会议,主办方按照顺序一支队伍一支队伍的跑代码,当看到测试物品的时候,被吓了一跳,螺栓都很多超过5cm的,很多甚至10cm~20cm之间,这在我们平时是很少测试的,而且摆放的复杂程度大大超过了预期,叠放、遮挡、竖放很严重,默默为我们算法担心。线上比赛也没有办法,只能默默祈祷,最终第一轮还好拿了4.2分,暂时排在第二。
下午是第二轮,动态物品测量,难度更大。轮到我们大概3、4点了,这次测量环境更难,物体摆放的离谱,下面是摆放时拍的图,最终比时,比这还复杂多了。最终拿了3.3分(感觉这是保底测量分了),两轮排位第三。对结果还是挺失望的,毕竟准备了这么久,本来是冲着冠军去的。
总结
本来以为国一无望了,官网当时只有每只队伍的排名,没有具体几等奖,都开始准备考研了,考研一周左右的时候。去申请奖状,给我们发了国一,哈哈,当时知道的时候还是很激动的吧。毕竟国一保研了,本来早就期待保研生活了,后来失利了那就考研去,突然又保研了,挺高兴的。
对这个项目,毕竟是自己一手带大的也是忙活了大半年,期间学到了很多,还有和队友一起努力,分析,解决问题的一路,很美好的回忆哦~
线上比赛,体验感很差,放张结果图吧。
